Pure motor monoparesis (PMM) is an isolated motor deficit, most often following a stroke, that affects a single limb while leaving sensation and other limbs largely unaffected. It's a relatively uncommon presentation — roughly 2.6% of stroke cases — but for the limb it affects, it can mean losing functional strength while retaining full sensation and awareness of the impairment. Most existing upper-body exoskeletons on the patent record are built for rehabilitation programs rather than everyday assistance, leaving a gap for a device meant for daily use.
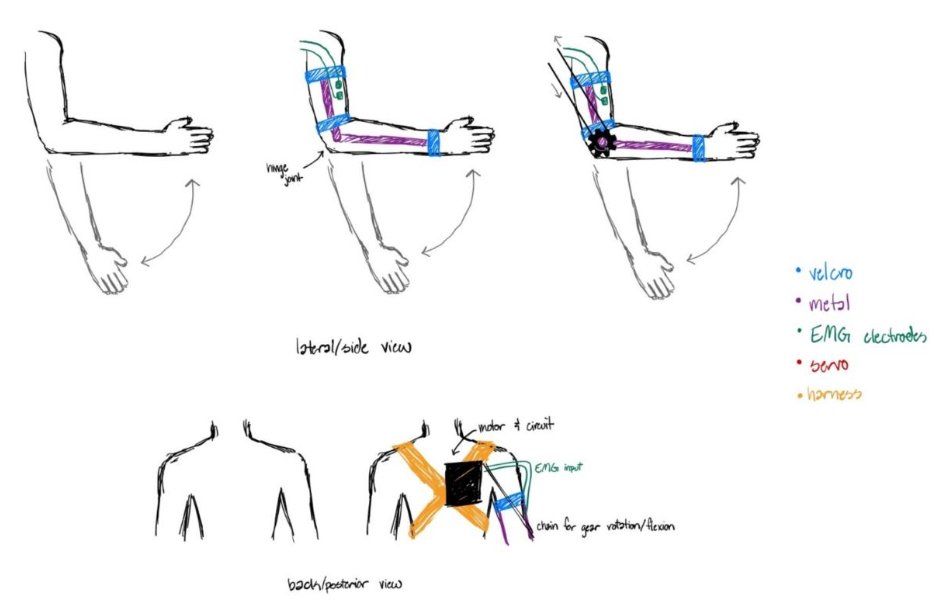
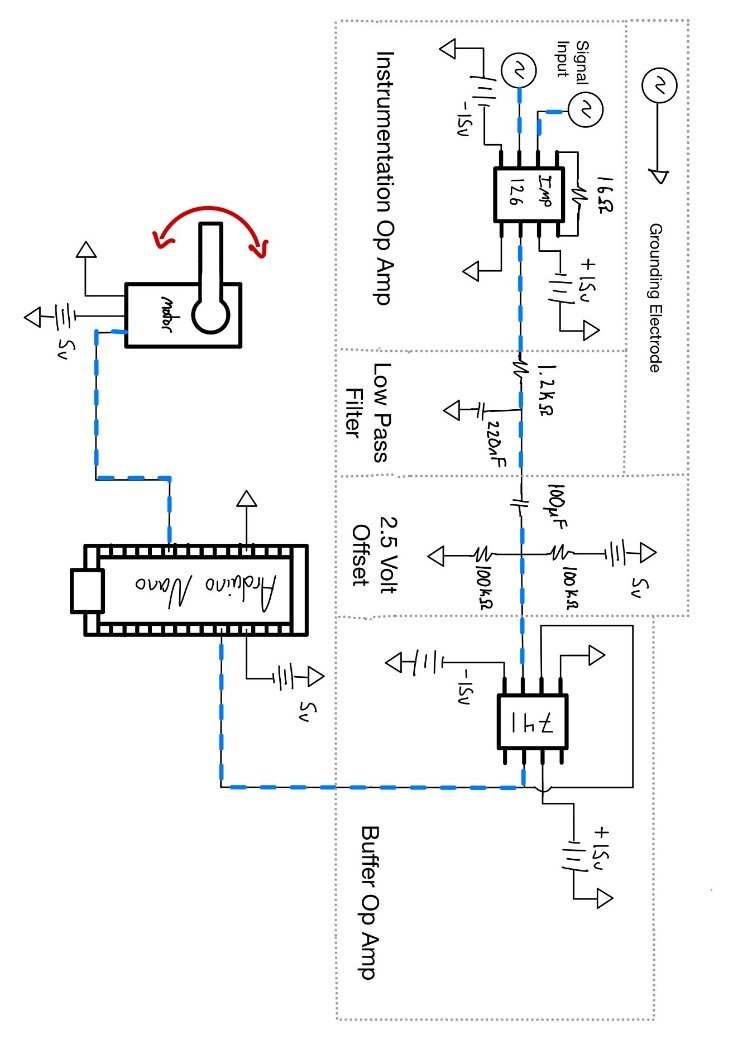
The brace secures aluminum bars to the arm with Velcro, hinged at the elbow joint, with a gear-and-pulley system connecting that hinge to a motor mounted on a harness. EMG electrodes on the bicep feed into an instrumentation amplifier and low-pass filter, buffered through an Arduino Nano, which drives the motor whenever it detects a signal consistent with an intent to flex the elbow.